

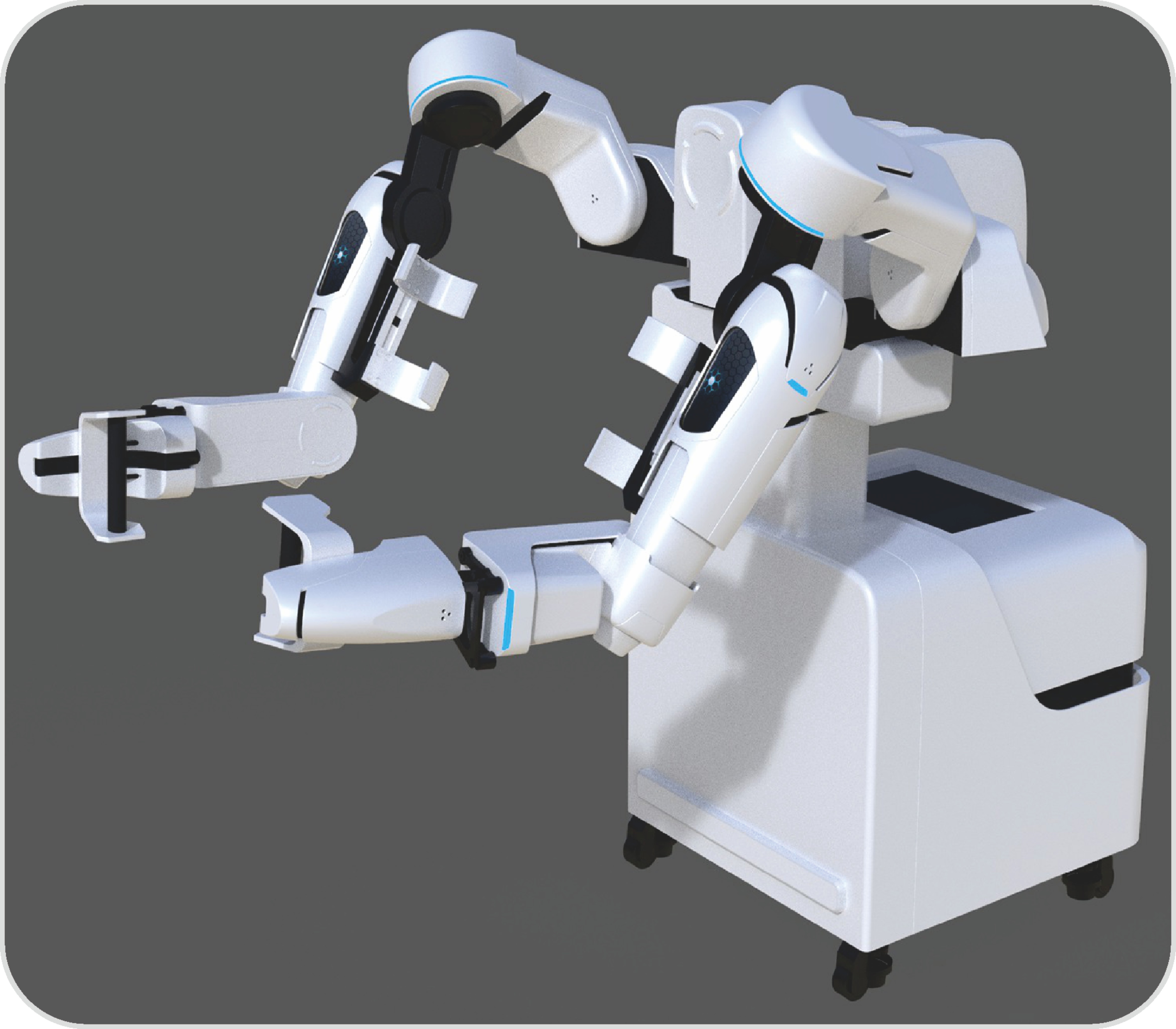
上肢康複機器人(rén)的(de)驅動關節就像我們人(rén)體的(de)關節一樣,是讓手臂自由活動的(de)重要部分(fēn)。想象一下(xià),如果你的(de)關節僵硬,活動受限,那你的(de)行動肯定會受到很大(dà)的(de)影(yǐng)響。同樣的(de),對(duì)于那些因疾病或受傷導緻上肢活動不便的(de)人(rén)來(lái)說,上肢康複機器人(rén)就是他(tā)們的(de)“關節”。
那麽,這(zhè)個(gè)“關節”是由哪些零件組成的(de)呢(ne)?其實,上肢康複機器人(rén)的(de)驅動關節主要由以下(xià)幾個(gè)部分(fēn)構成:
1️⃣ 電機:就像我們體内的(de)肌肉一樣,電機爲機器人(rén)提供動力。
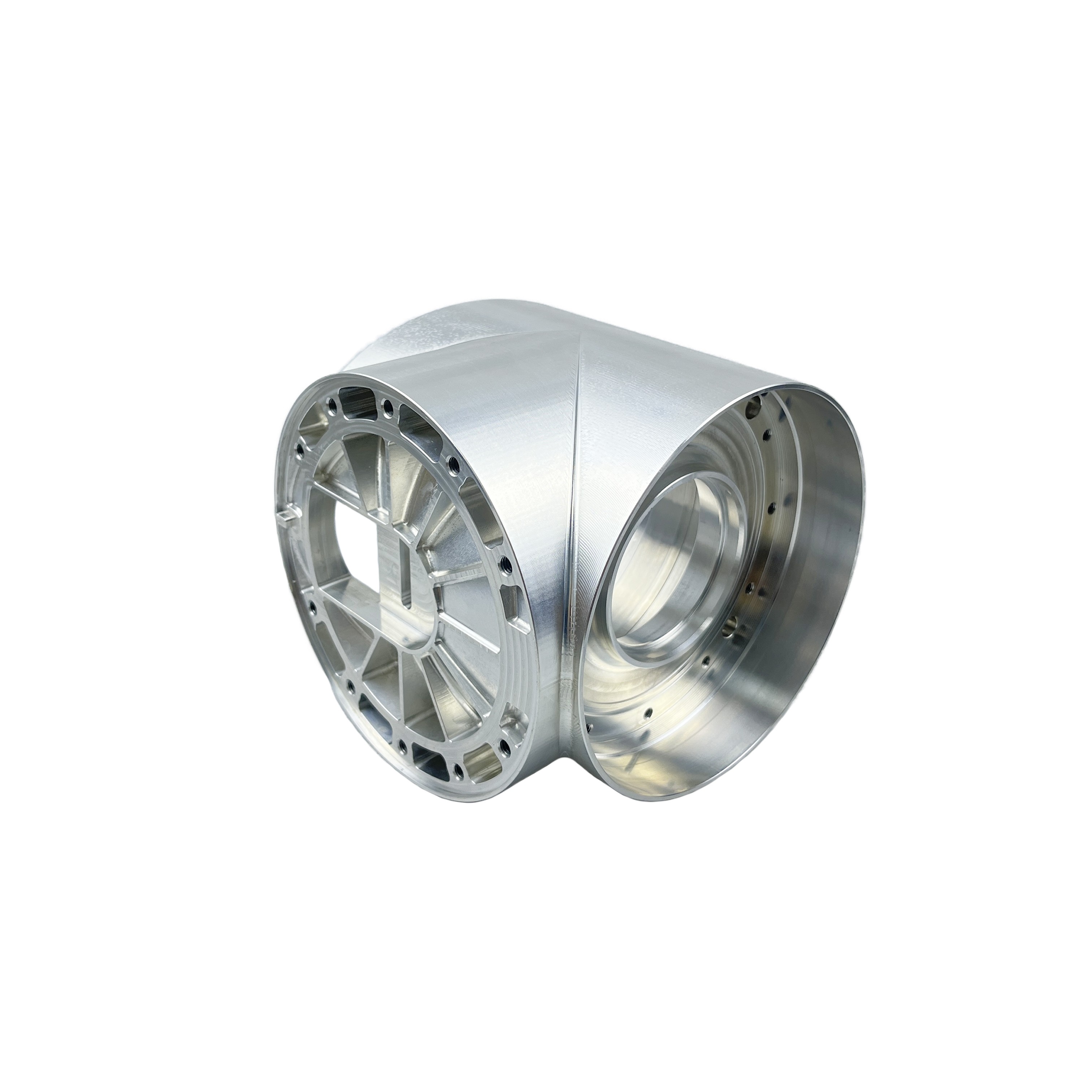
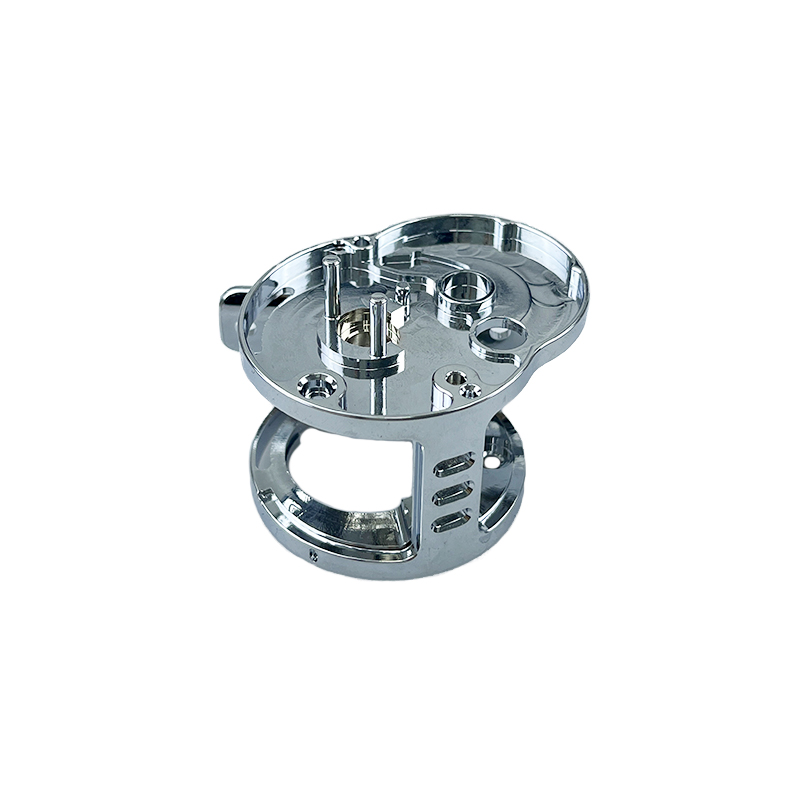
2️⃣ 傳動裝置:就像我們體内的(de)骨骼和(hé)韌帶,傳動裝置負責将電機的(de)動力傳遞到手臂的(de)各個(gè)關節。
3️⃣ 傳感器:這(zhè)個(gè)傳感器就像是我們的(de)神經系統,能夠感知和(hé)檢測手臂的(de)位置和(hé)運動狀态,确保機器人(rén)的(de)動作準确無誤。
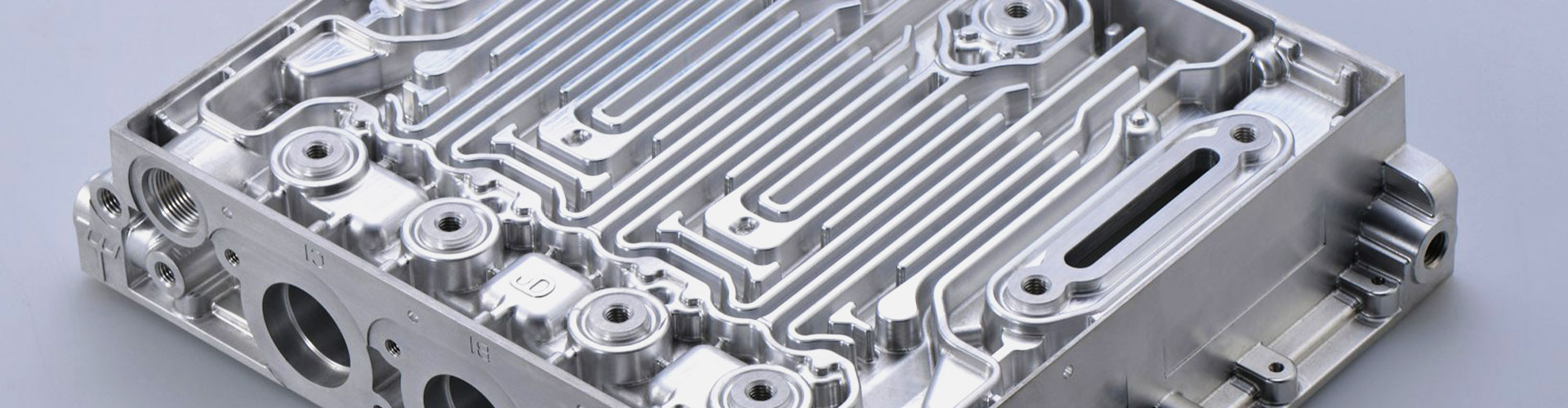
4️⃣ 控制單元:這(zhè)個(gè)控制單元就像是我們的(de)腦(nǎo)子,負責接收和(hé)解析傳感器的(de)信号,控制電機的(de)運動,從而實現各種康複訓練動作。
這(zhè)些零件協同工作,讓上肢康複機器人(rén)能夠模拟真實的(de)人(rén)手運動,爲患者提供個(gè)性化(huà)的(de)康複訓練。